
As you can see, in article of “The
Change Depends on the Direction of the Motion: Generating All Directions in 3D
Space” posted on link: https://emfps.blogspot.com/2017/05/the-change-depends-on-direction-of.html, only one particle (or one point) was moving on a circle or a
sphere to produce some formulas. But, if we increase the number of the
particles (points) by two, three, four, five and more in which these points are
symmetrically and simultaneously travelling on a circle or a sphere, we will
have a symmetric group action. In fact, the results of the particles ’motions
make some matrices n*n as operators and some matrices m*n as transformation
matrices where all these matrices as symmetric groups actions have very
interesting properties. In real world, we can see the applications of these
symmetric groups actions every day. For example, an airscrew, screw propeller,
ceiling fan, turbine, rotary machines, rotary heat exchangers, helicopter
blade, vibrations of a circular drum and also in quantum
physics, Hamiltonian operator for Schrodinger’s equation, in chemistry the
methane molecule (CH4) is a symmetric group action by four points (particles), all are the ideas inferred from the great theory in mathematics
which is the Group Theory.
Even though these operators and
transformations have many properties, my focus in this article is only to
generate the fields (orbits) and its magnitude. Thus,
the purpose of this article is firstly to make many operators and
transformations matrices for two, three, four and five points which are
rotating and secondly to find out one the most important properties which is
the fields (orbits) and its magnitude.
Introduction
According to Tom Davis (2006) on paper
of “Group Theory via Rubik’s Cube”, he stated:
“A group is a
mathematical object of great importance, but the usual study of group theory is
highly abstract and therefore difficult for many students to understand. Very
important classes of groups are so-called permutation groups which are very
closely related to Rubik’s cube. Thus, in addition to being a fiendishly
difficult puzzle, Rubik’s cube provides many concrete examples of groups and of
applications of group theory.”
Therefore, it is better for the
beginners to perceive the concepts and applications of the Group theory,
provide a Rubik’s Cube.

The most important operators in Physics and Engineering
are the Gradient, Curl and Divergence.
In fact, an operator is a mathematical object that maps one state vector into
another one in which it can be written in matrix form and is considered as a
group action which is continuous such as rotation of a circle or discrete such
as reflection of a bilaterally symmetric figure. The group theory develops the
significant features in the formulation of physics similar to chemistry where
the group theory is utilized to illustrate symmetries of crystal and molecular
structures. It means that the applications of the group theory are endless.
In the next part, I will continue
the topic by rotating two points on diameter of a circle then I develop it by
using two points on dimeter of a sphere.
An operator by two points on circle
Suppose you are rotating two points on a circle which have the
distance equal to 2r, just like below figure:

As you can see, actually you are
making many ellipses in different directions:

The general formula of these
ellipses is as follows:

Where:
r: radius of circle
θ: angle of rotating
x, y: coordinates of point P on each
ellipse
2a:
sum distance between point P (on ellipse) and two points on diameter of
circle
If we assume two points “A” and “B”
on diameter of circle which are rotating in counterclockwise and have the
distance equal 2r, above formula will be obtained by using their polar
coordinates as follows:
A:
x = r.cosθ
y = r.sinθ
B:
x = -r.cosθ
y = -r.sinθ
or
A:
x = r.sinθ
y = -r.cosθ
B:
x = -r.sinθ
y = r.cosθ
Polar coordinates of points A and B
give us a matrix 2*2 which is an operator:

The properties
of two point’s operator in surface
Now, I investigate the properties of
matrices M or N by multiplying 2D unit vectors in all directions (V * M or V *
N)
Theorem (1): The
maximum magnitude among vectors produced by two point’s operator (matrix M or
N) is equal radius (r) multiply (2^0.5) and minimum magnitude is equal zero.
│V│max =
(2^0.5).r and │V│min = 0
Theorem (2): The
equation of produced vectors is generally:
V = a (i – j) in which
Vmax = r (i –j) and the direction is: V =
0.7071i – 0.7071j and V = -0.7071i + 0.7071j
Third property is very interesting
where it is about Eigenvalue and Eigenvector of above operator.
Theorem (3): Eigenvalue and Eigenvector
of Matrix M or N for the range of angles:
-135 ≤ θ <45
and -360 ≤ θ < -315 for different radiuses (r) are obtained only in
directions of 135 degree and 315 degree.
Example: I calculated some samples
on excel spreadsheet as follows:

The properties
of transformation matrix for two points in 3D space
If we want to study these two points
in 3D space rotating on circle, we will have a transformation matrix. In this
case, there are several statements where I have started three forms as follows:
1. I added a constant coordinate (z) for each point and matrix will
be:

The properties
of transformation matrix 2*3 for R^2 to R^3
This matrix transforms 2D unit
vectors in all directions to vectors in 3D space.
Theorem (4): Maximum
and minimum magnitudes among 3D vectors produced by transformation matrix M are
calculated by using below equations:
│V│max = max
(z, r)*(2^0.5) and │V│min = min (z,
r)*(2^0.5)
Thus, if z = r
then all magnitudes of 3D vectors will be the same.
Theorem (5): If
z > r then the direction of maximum output will be (0, 0, 1) or (0, 0, -1).
If z > r
then the direction of minimum output will be (0, 0, 1) or (0, 0, -1).
The properties
of transformation matrix 3*2 for R^3 to R^2
It is transpose of previous matrix
in which we will have below matrix:

The property of this matrix is
similar to theorems (1) and (2).
2. I replaced the constant coordinate (y) instead of (z):

The property of this transformation
matrix is similar to theorems (4) and (5).
3. Suppose that two points in the space which have the distance equal
2r are rotating on a sphere. In this case, we will have below polar coordinates
for both of them:
Point A:
x = r * cos β * cos θ
y = r * cos β * sin θ
z = r * sin β
Point B:
x = -r * cos β * cos θ
y = -r * cos β * sin θ
z = -r * sin β
The properties
of transformation matrix 2*3 for R^2 to R^3
Above coordinates of points A and B
can make a transformation matrix as follows:

Note: θ and β
have been introduced in my previous article of “The Change Depends on the Direction of the Motion: Generating All
Directions in 3D Space” posted on link: https://emfps.blogspot.com/2017/05/the-change-depends-on-direction-of.html
The property of this transformation
matrix is similar to theorems (1).
The properties
of transformation matrix 3*2 for R^3 to R^2
The transpose of above matrix gives
us a transformation matrix 3*2 as follows:

The property of this matrix is
similar to theorems (1) and (2).
An example in
Fluid Mechanics
Assume a fluid is rotating in
counterclockwise by an angular velocity ω around z axis.
In this case, each particle on a circle with radius r which is perpendicular to
z axis is rotating just like below figure:
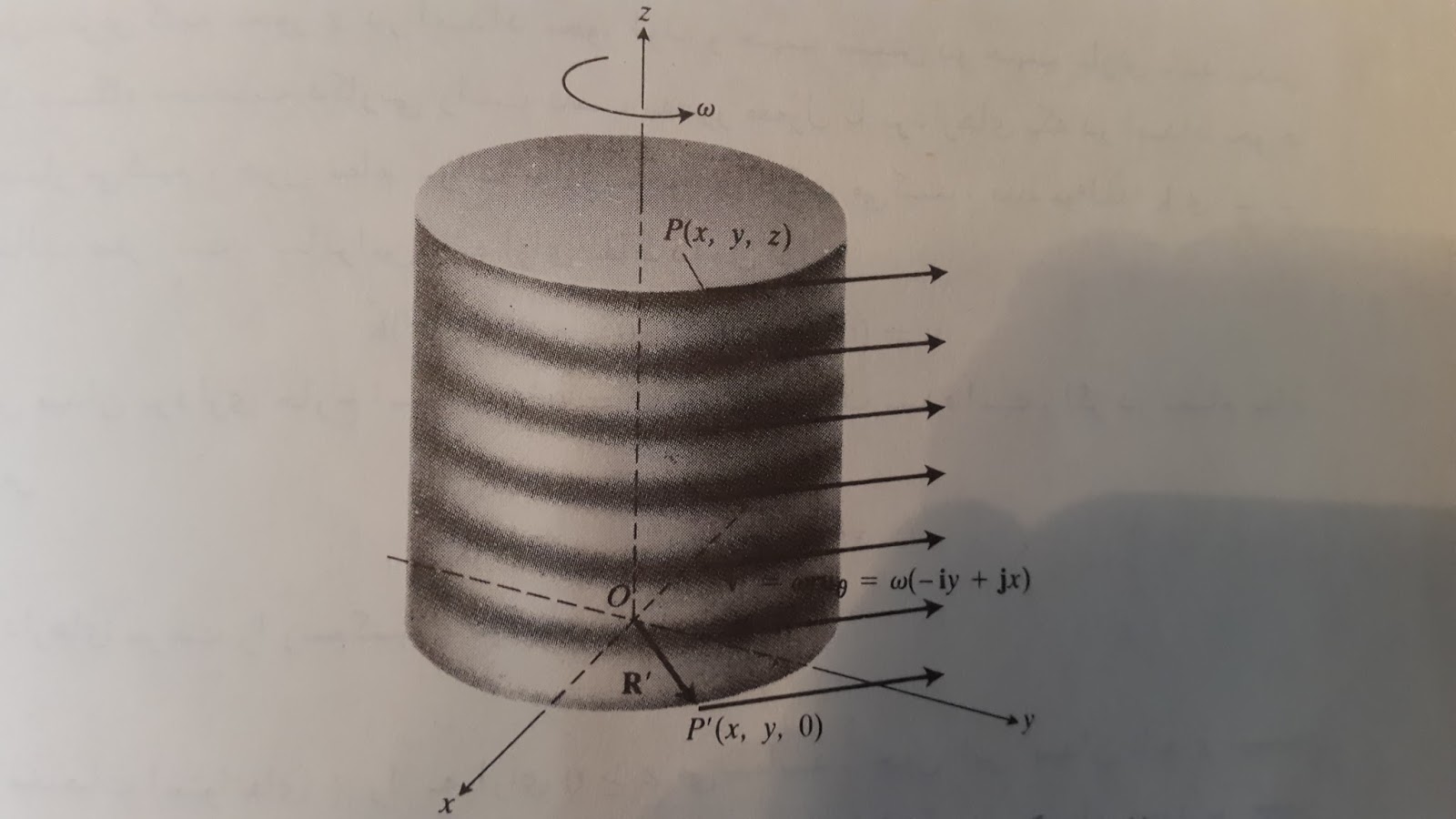
According to above figure, the
magnitude of velocity for the particle will be equal:
│v│= ω.r and also position vector of
this article will be: R = xi + yi
Since vector of velocity is
perpendicular to position vector, therefore, the equation for velocity vector
will be: v = ω (-yi + xj)
These are the
characteristics of this field. But this filed can be considered as an operator
of a whirlpool in 2D on a circle just like below photo:

An operator by three points on circle
Suppose three points on a circle are
rotating in which the distance among all three points are the same and equal.
For reaching to these conditions, below polar coordinates for each point should
be established:
A:
x = r cos θ
y = r sin θ
B:
x = - r sin (θ + 30)
y = r cos (θ +30)
C:
x = - r sin (30 – θ)
y = - r cos (30 – θ)
Above polar coordinates give us a
transformation matrix 3*2 as follows:

The properties
of transformation matrix 3*2 for R^3 to R^2
To be continued….
Note:
All researchers
who are interested in having these models to find out further the properties,
do not hesitate to send their requests to my email: soleimani_gh@hotmail.com