This is an example for solving a system of nonlinear
equations by using the Big Data Science Analysis with Microsoft excel plus VBA.
Definitely, there are many complicated problems that can be
solved by using this analytic model. For instance, one of the applications of
this model is to solve problems related to optimization, such as Hill
Climbing.
For example, what is the maximum area of a rectangle
inscribed in a circle with a radius of 2 units?
You can find the answers for “x” and “y” in this rectangle
in the below data analysis:
I would like to inform you that this
model is able to solve all linear and nonlinear system of equations in which it gives us less error than traditional methods such as
Newton – Raphson , Gauss – Seidel, Jacobian and so on. Don't worry, if you have
not any knowledge about traditional methods. Dive into new technology.
Example: A
Model to Track the Location of a Particle in the Space
One of the most important needs for many projects is, quickly to track the motion of a particle when
it is tripping between two points in the space. For
instance, suppose particle P is moving by velocity “V” with accelerate equal to
zero from point A (x1, y1, z1) to point B (x2, y2, z2). We want to know the
coordination of P (x, y, z) at the moment of “t” when it is moving in direction
of A to B. This model gives us the opportunity to obtain the coordination P (x,
y, z) only by click. In fact, if we have the coordination P (x, y, z), it will
be as an index for us that other particles which are moving from A to B such as
P1, P2, …. are not tripping in the exact direction of A to B. In this case, we
have to solve a system of two nonlinear equations as follows:
First of all, we should define amount of “a”
and “b” as follows:
The
distance of point A to point B is calculated by using below formula and also
“X” is the distance that particle P will travel after time “t” in direction of
A to B:
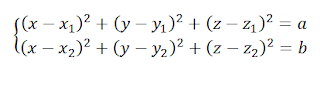
Therefore, we should
solve below system of two nonlinear equations
Below figure as well as shows you the components of this model
Let me explain you about the components of
above model as follows:
1. In right side on cells G4:J10, we have
inputs including the coordination points A and B, velocity of particle P (v),
the time after staring to travel particle P (t) and Error which is the
difference between the results. So, X = v.t, d = distance between point A and B
and on cell G10, I have included a logic formula (=if (H8 >= H9, H8, 0)). It
means, if X = 0 then the particle has passed point B
2. In left side on cells
C5:E6, we have other inputs including the ranges to reach to the answer for coordination particle P (x, y, z) which is the solution for system
of two nonlinear equations.
Here, there are lower and upper ranges which are
changed by click on cell A2 and also this change will again go back by click on
cell B2 (Go & Back).
This part has been utilized by the method stated in article of “Can We Solve a
Nonlinear Equation with Many Variables?” posted on link:
http://emfps.org/2016/10/can-we-solve-nonlinear-equation-with.html
3. On cells C9:E9, we have outputs which are the
answer to above
system of two
nonlinear equations.
4. On cells C12:E13, we have Control (1) where first equation is
solved by using the coordination A
and P and it is compared with amount of
“X^2” on cell C14. So, second equation is solved by using the coordination B
and P and it is also compared with amount of “(d-X)^2”on cell C15. The differences
have been mentioned on cell G12 and G13 as the errors.
5. On cells E15:G17, we have Control (2) which is referred to track
the directions in which we are willing to know if the motion of particle P is in
direction from point A to point B. In this case, a control can be conducted by
using below formulas:
You can see below screenshot as the examples for this model:
Conclusion
.Above article gives you
a simple example
In fact, I am willing to
tell you that this model is able to solve all system of two or three
nonlinear
equations.
All researchers and individual people, who are interested in having
this model, don’t hesitate to send
their request to below addresses: